
강의 소개
커리큘럼

미친듯이 성장하고 있는 인공지능 기술! 그 Next Step은 무엇일까요?
바로, 스스로 판단하고 움직이는 ‘자율주행 로봇’입니다.
ROS2와 Gazebo로 AI 기반 자율주행을 직접 구현하며 미래 로보틱스 기술을 완성해보세요.

실제로 경험한 미래, Waymo 자율주행 택시 시승기
왜 ‘자율주행 로봇 시뮬레이션’일까요?

- 전 세계 로보틱스 기업들이 ROS2 + 시뮬레이션 중심 개발로 빠르게 전환 중
- 하드웨어 없이도 가상 세계에서 “완벽한 테스트 → 실전 적용”이 가능
- 센서 기술(LiDAR, 카메라), 제어(PID), AI(강화학습)까지 모두 경험해야 진짜 자율주행을 이해할 수 있음
- 자율주행 엔지니어는 글로벌 시장에서 극도로 수요가 높은 직군
본 과정이 해결하는 핵심 포인트
- ROS2 설치부터 패키지 개발, 노드·토픽·메시지 구조까지 실전 기반으로 익힘
- Gazebo 환경에서 실제 로봇처럼 움직이며 주행 알고리즘을 실습
- OpenCV 기반 라인 감지 → LiDAR 기반 장애물 회피 → 강화학습 기반 자율주행까지
- 이론이 아니라 “직접 구현하는 실습 중심 자율주행 과정”

이런 고민이 있나요?
공부를 어떻게 시작할지 막막하고, 실습 환경 구축이 어려워요
영상 처리와 자율주행 로직을 실제 로봇에 적용하는 방법을 모르겠어요

ROS2 경험이 없어 프로젝트나 논문 준비가 어려워요
AI 기반 로봇 제어를 시뮬레이션으로 검증하는 방법을 모르겠어요


이렇게 성장할 수 있어요!
ROS2와 Gazebo 설치부터 로봇 제어까지 “입문자가 따라올 수 있는 실습 로드맵”이었어요
OpenCV 기반 라인 감지·트래킹, 센서 기반 회피 주행까지 직접 구현했어요

노드/토픽/패키지 구조 등 실무 필수 개념을 실습으로 익혀 포트폴리오를 제작할 수 있었어요
TD3·SAC 강화학습 적용까지 실습하며 “AI 자율주행 로봇”의 기본기를 습득했어요

어떤 기술을 배울 수 있나요?

ROS2

Gazebo

Python

OpenCV

LIDAR · 초음파

ROS2
전 세계 로봇 기업이 사용하는 로봇 SW 표준 플랫폼
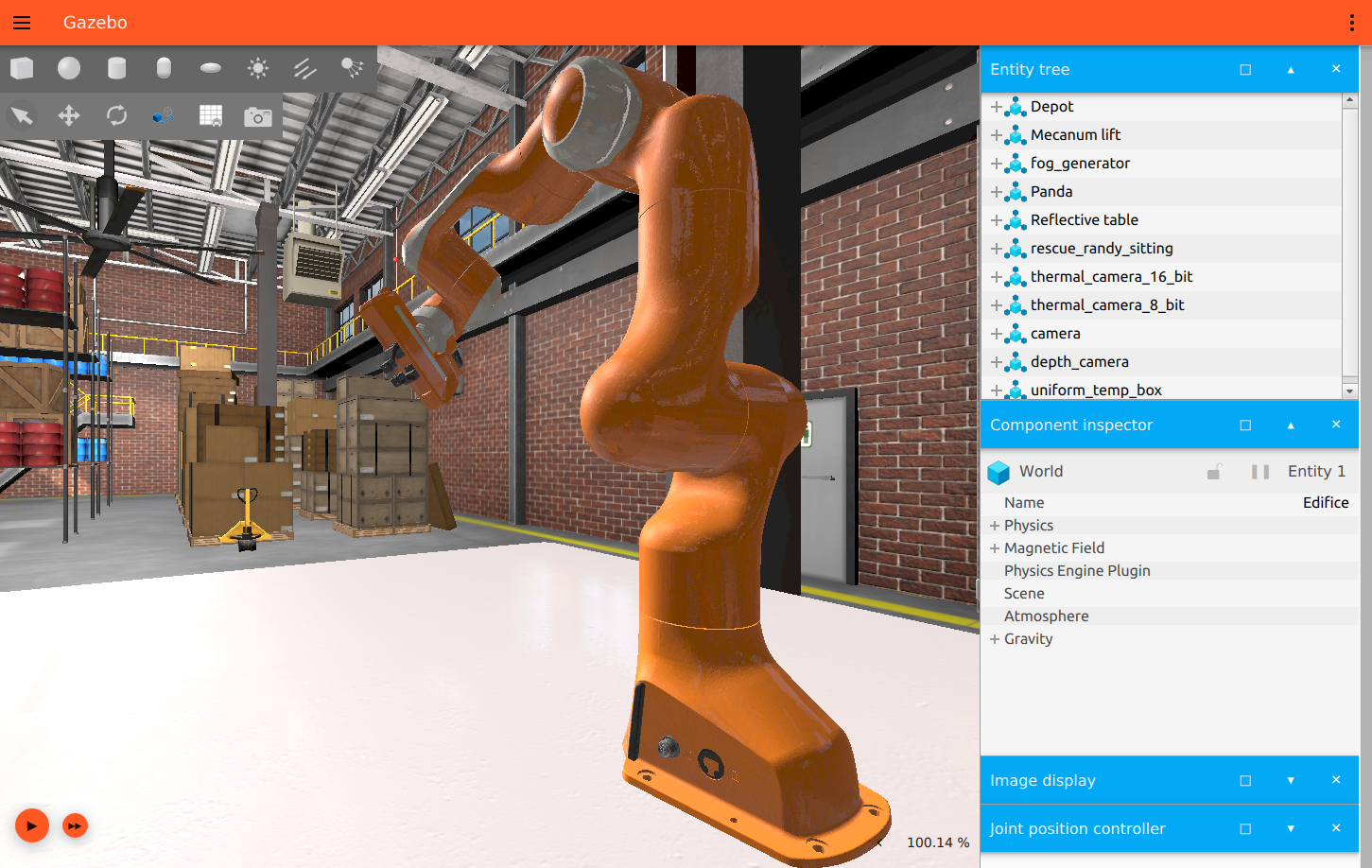
Gazebo 시뮬레이터
실제 로봇과 거의 동일한 3D 물리 환경을 구현
Python
ROS2 개발의 주력 언어이자 AI 구현에 가장 널리 사용
OpenCV
자율주행의 핵심인 “카메라 기반 인식”을 구현하는 필수 기술
강의 & 프로젝트 맛보기
아래는 강의 맛보기 영상 및 실제 강의에서 수행되는 프로젝트입니다.
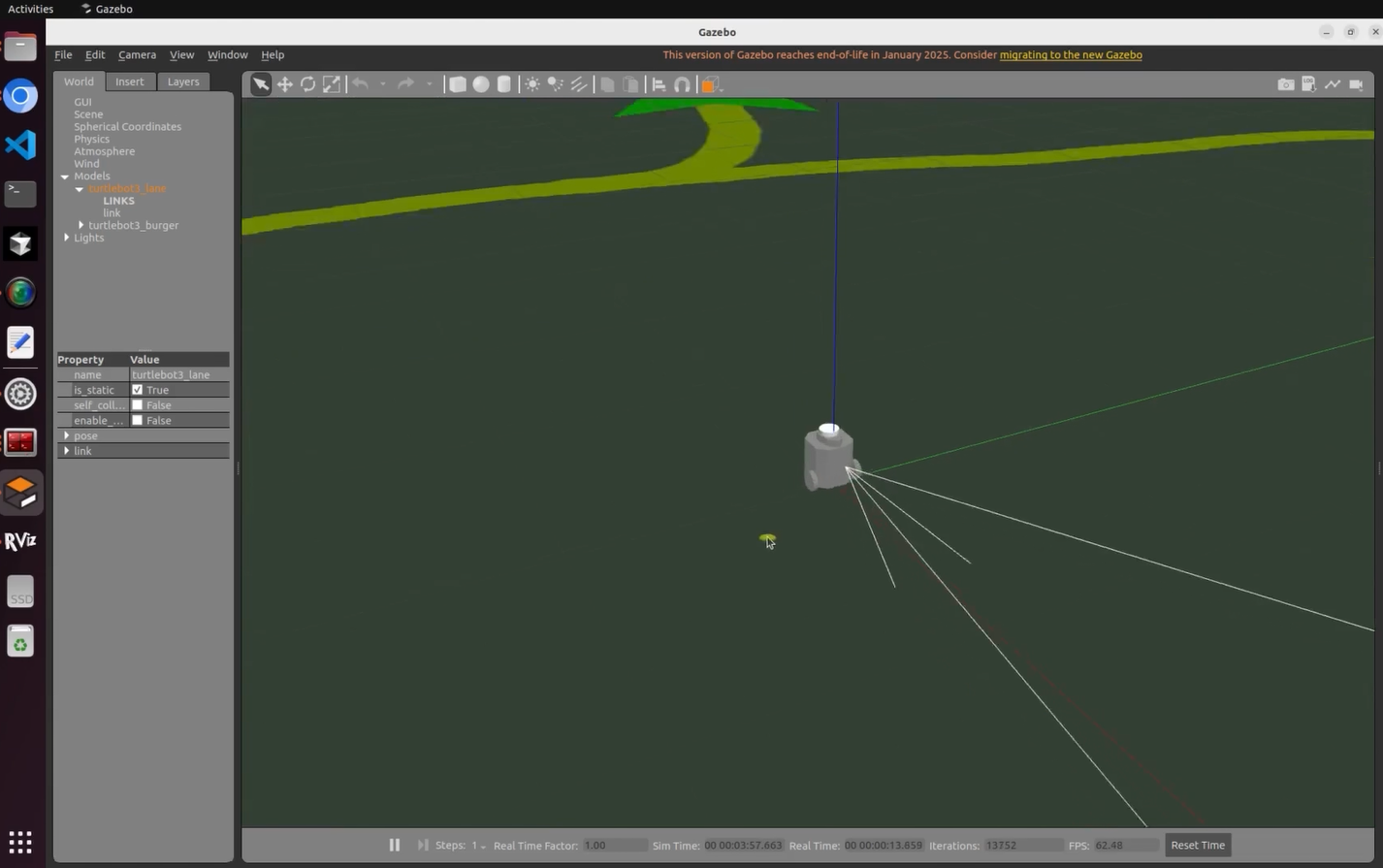
1️⃣ LiDAR 기반 장애물 인식 시뮬레이션
Gazebo 환경에서 로봇에 장착된 LiDAR 센서가 주변 구조물을 어떻게 스캔하고 인식하는지 실시간으로 확인합니다. 각도·거리 데이터를 기반으로 장애물을 파악하고 경로를 결정하는 자율주행의 핵심 원리를 시각적으로 이해할 수 있어, 이후 회피·벽면 추종 알고리즘 구현의 기초가 됩니다.
2️⃣ LiDAR 기반 벽면 추종 주행
좁은 공간과 벽면 근처에서도 로봇이 안정적으로 주행할 수 있도록 LiDAR 데이터를 활용해 벽과의 거리를 계산하고 유지하는 알고리즘을 실습합니다. 센서가 감지한 각도·거리 정보를 기반으로 로봇이 스스로 방향을 조정하는 과정을 시각적으로 확인하며, 자율주행의 핵심 제어 기술을 체득할 수 있습니다.
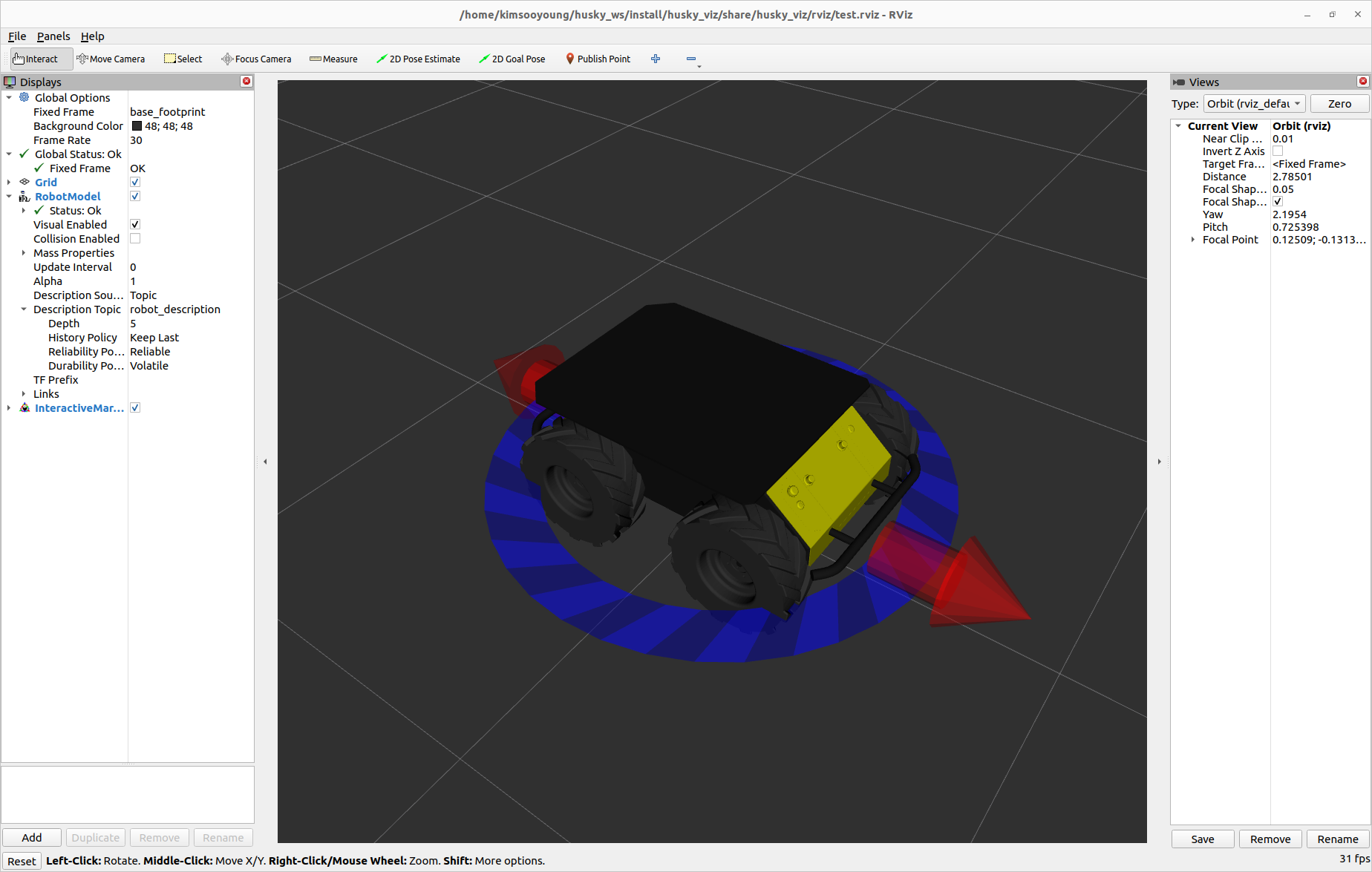
3️⃣ Husky Bot 자율주행 기본 실습
실제 연구·산업 현장에서 널리 사용되는 Husky 로봇 모델을 RViz 환경에서 불러오고, 좌표계·센서·로봇 모델이 어떻게 시각화되는지 직접 확인합니다. ROS2의 노드·토픽 구조가 로봇 움직임과 상태 표현에 어떻게 연결되는지 이해하며, 본격적인 자율주행 실습의 출발점을 경험합니다.
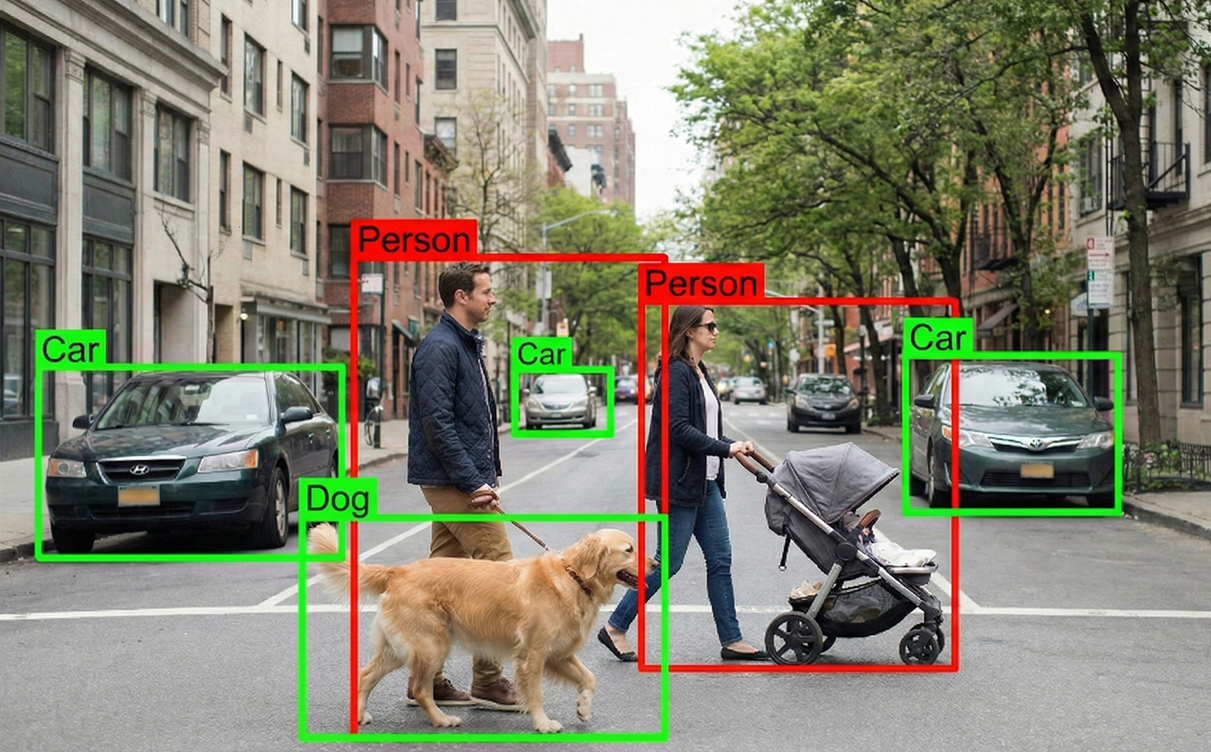
4️⃣ 실제 도로 영상을 활용한 차선 인식 알고리즘 구현
직접 촬영된 도로 주행 영상을 OpenCV로 분석해 차선을 검출하고, 영상 기반 자율주행의 핵심 원리를 파악합니다. 이미지 처리 파이프라인을 코드로 구현하며, 단순한 시뮬레이션을 넘어 실제 도로 상황에서도 작동하는 차선 인식 알고리즘을 완성하게 됩니다.

자율주행, 내게 너무 어렵지 않을까 고민 되시나요?

- ROS2 설치만 해도 실패하기 쉬움
- 센서 데이터 처리와 제어 로직 연결이 어려움
- Gazebo 환경 구성 자체가 너무 낯설음
- 알고리즘 구현 과정에서 디버깅 포인트를 찾기 어려움
- 강화학습 기반 자율주행은 정보가 흩어져 있어 학습 난이도가 매우 높음

강의에서는 이렇게 해결합니다!
- OS별 ROS2·Gazebo 설치법 안내
- Gazebo 월드 구성 → ROS2 노드 → Topic 통신을 직관적인 흐름으로 설명
- OpenCV 기반 라인 감지부터 LiDAR 기반 회피까지 실제 주행 알고리즘 구현
- 강화학습 TD3·SAC 코드를 직접 분석하며 AI 자율주행 구조를 시각적으로 이해
- 모든 실습은 자체 제공되는 워크스페이스 기반으로 에러 최소화 설계
학습 로드맵
Step 1. 자율주행 기본기 다지기
자율주행 개념 이해부터 ROS2·Gazebo 설치와 기본 시뮬레이터 환경을 구축합니다.
Step 2. ROS2 핵심 구조 익히기
패키지·노드·토픽 등 ROS2의 기본 구조를 실습으로 익혀 데이터 통신 흐름을 파악합니다.

Step 3. 자율주행 로직 구현하기
OpenCV 기반 차선 인식, PID 제어, 장애물 회피 등 핵심 주행 로직을 시뮬레이션으로 구현합니다.
Step 4. AI & 실물 로봇 확장
TD3·SAC 강화학습과 JetBot·Raspberry Pi 적용으로 AI 기반 주행과 실물 확장을 경험합니다.

강사 소개
김수영
Robotics Software Engineer
로보틱스 업계에 몸담고 있는 개발자로, 제어·비전·AI까지 로봇을 움직이는 모든 기술을 직접 다루며 경험을 쌓아온 엔지니어입니다.
실리콘밸리에서 로봇 개발자로 일하며 얻은 실전 경험과 노하우를 더 많은 사람들에게 전하고자,
ROS2 · Gazebo · 자율주행 AI 실습 중심의 교육 콘텐츠를 제작하고 있습니다.
“로봇은 이론만으로 성장할 수 없습니다. 만들어보고, 실패해보고, 직접 움직여 보며 배워야 합니다.
이 강의가 여러분이 로보틱스 세계로 진입하는 첫 걸음을 돕는 도구가 되길 바랍니다.”
현 Proception AI Robotics Software Engineer
전 Road Balance Founder
전 와트(watt) Co-Founder
전 씽씽 (주)피유엠피 Co-Founder
현대자동차, 국방과학연구소, 한국전자통신연구원 등 강의 다수
University of California, Irvine, Department of Electrical Engineering and Computer Science 석사

수강 전 Q&A


이런 혜택을 얻을 수 있어요

무제한 온라인 수강
언제 어디서든 편하게 학습해요
실무 템플릿 제공
오늘 배운 내용, 내일 바로 적용해요

전문 멘토의 Q&A
막히는 부분을 빠르게 해결해 드려요
수료 특전
수료 시 원하는 강의 1개 추가 무료 제공
커리큘럼
중급
90
11시간 49분